AGREED

Gesamtdemonstrator des Teilprojekts AGR33D Nordenham: Digitalisierung und Arbeitsplanung.
KI-basierte Montage in der Fertigung von Flugzeugschalen mittels Reinforcement Learning
Die Digitalisierung in Kombination mit Verfahren der künstlichen Intelligenz verspricht die Automatisierung von komplexen Fertigungsaufgaben, welche mit klassischen Verfahren in der Regel nur bei hohen Stückzahlen wirtschaftlich realisierbar sind. Das Vorhaben AGREED verfolgt das Ziel, kosten- und qualitätsbedingte Wettbewerbsvorteile durch die Entwicklung von (teil-)automatisierten und digital gestützten Prozessen im Bereich der Montage von Flugzeugschalen zu schaffen. Das Institute for TMDT forscht hierbei in Zusammenarbeit mit der Premium Aerotec GmbH in zwei Anwendungsfällen an der Einführung von KI-gestützten Steuerung von Montagerobotern sowie die Nutzung von Methoden der künstlichen Intelligenz zur Schaffung adaptiver Prozesse.
Ziel des ersten Anwendungsfalls ist eine vollständige Automatisierung der Montage von Bauteilen mittels Roboter im Bereich von Flugzeug-Teilschalen und die Vermeidung von aufwendige Teach-In Verfahren. Hierzu werden Methoden des Reinforcement Learning erforscht und entwickelt, um intelligente und selbstlernende Agenten zu trainieren, die eigenständig auf Basis erfasster Sensordaten eine automatisierte Programmierung zur Steuerung von Greif- und Fügeprozessen vornehmen. Um einen hohe Trainingsaufwand in komplexen realen Umgebungen zu vermeiden, werden Lösungen des Transfer Learning zum effizienten und kostengünstigen Anlernen der Agenten aus simulierten Umgebungen entwickelt.
Im zweiten Anwendungsfall steht die automatisierte Erstellung von Arbeitsplänen für die Zusammenarbeit von Menschen und Robotern in der Schalenendmontage im Fokus. Konkret werden nach der vollständigen Digitalisierung des bisher papierbasierten Arbeitsplanung Verfahren des Reinforcement Learning für eine automatisierte Analyse von Prozessdaten entwickelt. Ziel ist die Realisierung einer intelligenten, dynamischen und adaptiven Planung und Verteilung der Arbeitsschritte. Hierbei werden aufkommende Ressourcenengpässe oder Maschinenausfälle durch eine gezielte Umplanung kompensiert und durch die dynamische Verteilung zwischen Mitarbeitern und Robotern eine ressourcenschonende Endmontage bei niedrigeren Durchlaufzeiten und höheren Volumen erzielt.

Präsentation des Demonstrators: Reinforcement Learning Robotics

Die Roboter des Teilprojekts "Reinforcement Learning Robotik" im Einsatz.
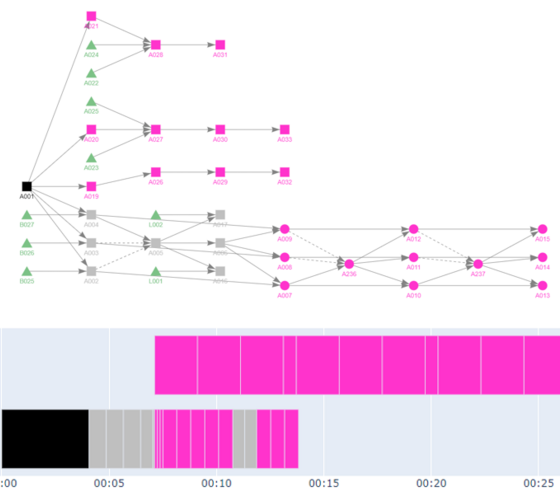
Teilprojekt: "Arbeitsplanung mit KI: Aufgaben und Abhängigkeiten"

Christian Bitter und Jannik Peters auf Besuch bei PAG Nordenham.