Industrial Deep Learning
Im Bereich "Industrial Deep Learning" erforschen wir Deep Learning-Technologien für industrielle Anwendungen, um innovative Lösungen in Produktion, Logistik und Umwelt zu realisieren. Dabei verbinden wir Grundlagen-KI-Forschung mit der industriellen Praxis und konzentrieren uns auf drei Schwerpunkte
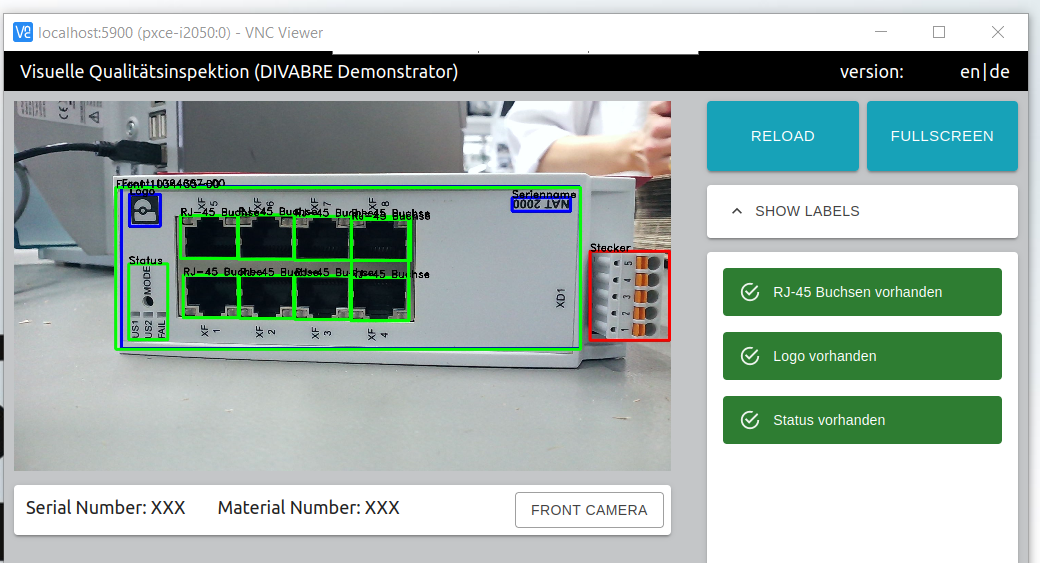
Bildbasierte Methoden zur Automatisierung von Qualitätskontrollen sowie zur präzisen Lokalisierung von Anomalien und Schäden.
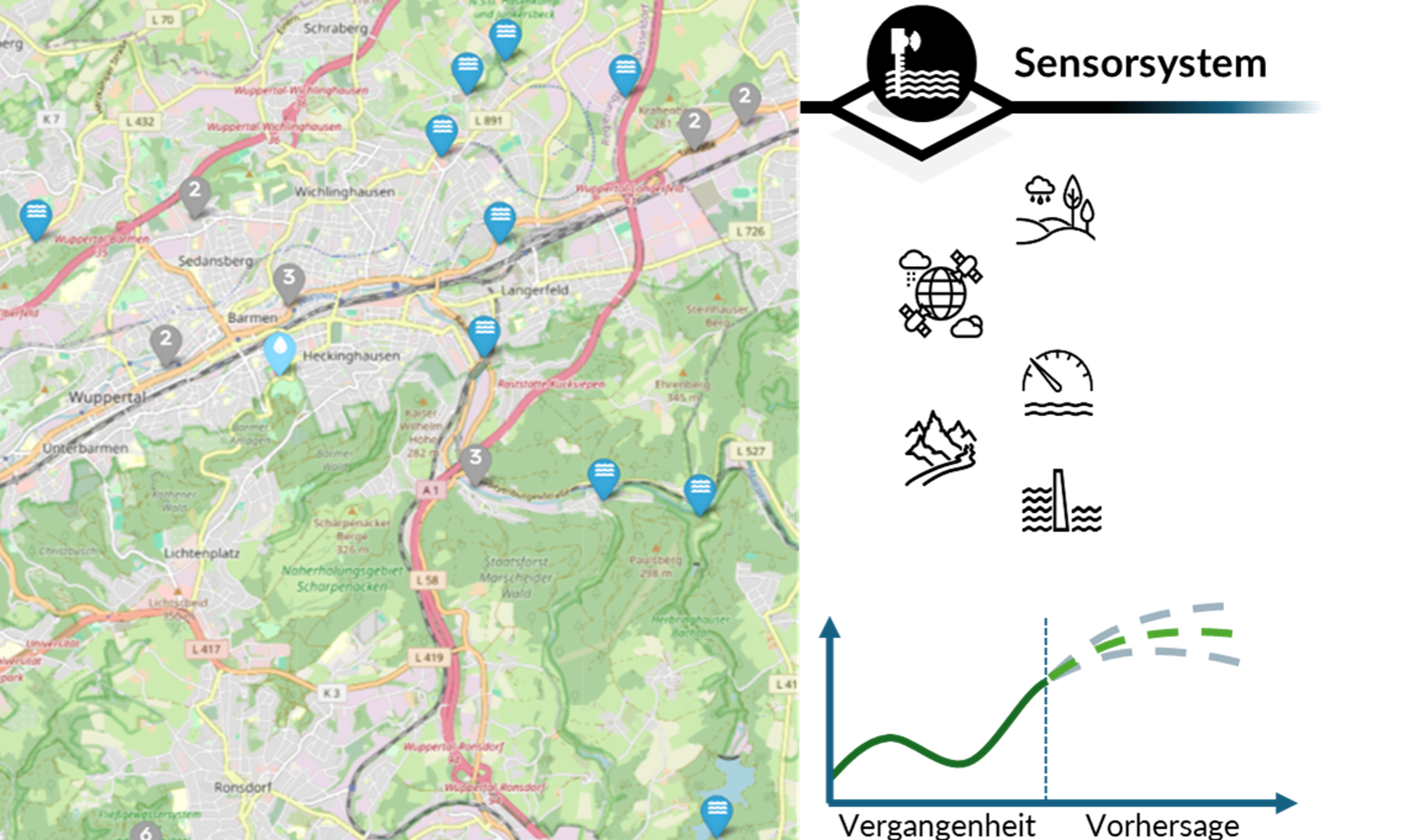
Sensorbasierte Situations- und Zustandsbewertung
Verarbeitung und Nutzung transienter und saisonaler Sensordaten für Zustandsüberwachung, Anomalieerkennung und Prognosen.
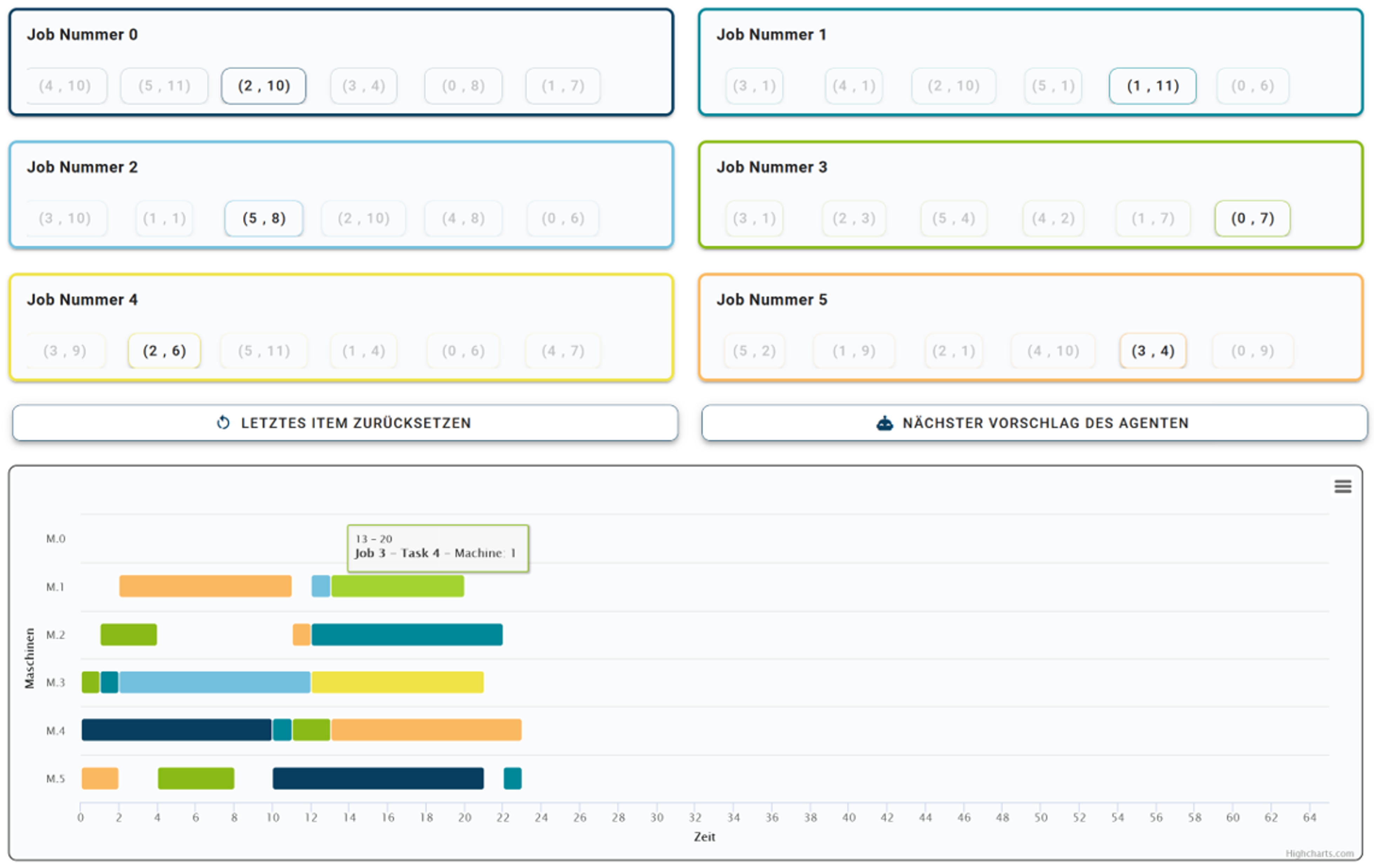
Intelligente Planung und Prozessgestaltung
Lernende Verfahren zur Lösung komplexer Planungs- und Optimierungsprobleme sowie zur Bewertung und Parametrisierung von Prozessen.
Unsere Forschung adressiert ein breites Spektrum an Deep Learning-Technologien, darunter verschiedene Lernparadigmen wie Supervised und Reinforcement Learning, Lernszenarien wie Transfer Learning, Representation Learning und Explainable AI, sowie Modellarchitekturen wie Transformer-Netze, Autoencoder und Generative Adversarial Networks.
Wir arbeiten eng mit Industriepartnern zusammen, sei es im Rahmen von öffentlich geförderten Projekten oder direkten F&E-Aufträgen. Dabei setzen wir uns intensiv mit realen Herausforderungen auseinander und beziehen stets die Bedürfnisse von Endnutzern und Fachexperten mit ein. Dieser Praxisbezug stellt sicher, dass unsere Forschungsergebnisse nicht nur theoretisch fundiert, sondern auch unmittelbar in der industriellen Praxis anwendbar sind und die Wertschöpfung verbessern.
Ausgewählte Publikationen
- 2018
- Haßler, M., Pomp, A., Kohlschein, C., & Meisen, T. (2018). "STIDes Revisited-Tackling Global Time Shifts and Scaling" , 2018 International Conference on Innovations in Information Technology (IIT) .
- Tercan, H., Guajardo, A., Heinisch, J., Thiele, T., Hopmann, C., & Meisen, T. (2018). "Transfer-Learning: Bridging the Gap between Real and Simulation Data for Machine Learning in Injection Molding" , Procedia CIRP , 72 , 185—190.
- 2017
- Tercan, H., Al-Khawli, T., Eppelt, U., Büscher, C., Meisen, T., & Jeschke, S. (2017). "Improving the Laser Cutting Process Design by Machine Learning Techniques" , Production Engineering , 11 (2), 195—203.
- Meyes, R., Tercan, H., Roggendorf, S., Thiele, T., Büscher, C., Obdenbusch, M., Brecher, C., Jeschke, S., & Meisen, T. (2017). "Motion Planning for Industrial Robots using Reinforcement Learning" , Procedia CIRP , 63 , 107—112.
- Haßler, M., Jeschke, S., & Meisen, T. (2017). "Similarity Analysis of Time Interval Data Sets Regarding Time Shifts and Rescaling" , Proceedings International work-conference on Time Series , 995—1006.